いわゆるメーカーズを標榜する各社が、センサーの物理I/Fの標準規格を提案しています。代表的なものに
SparkfunのQwiic
SeeedのGrove
DigilentのPmod
MikroElektronikaのmikrobus
DFRobotのGravity <– ‘18.11.26追記
スイッチサイエンスのConta
等があり、考え方がそれぞれ違います。当社の考えは
(1) 通信の規格はI2Cに限定する
当社のやりたいことはI2Cで実現できるからです。他の規格、例えばSPIなどが必要になった時に考えます。必要のないときに余計な規格を決める必要はないでしょう。
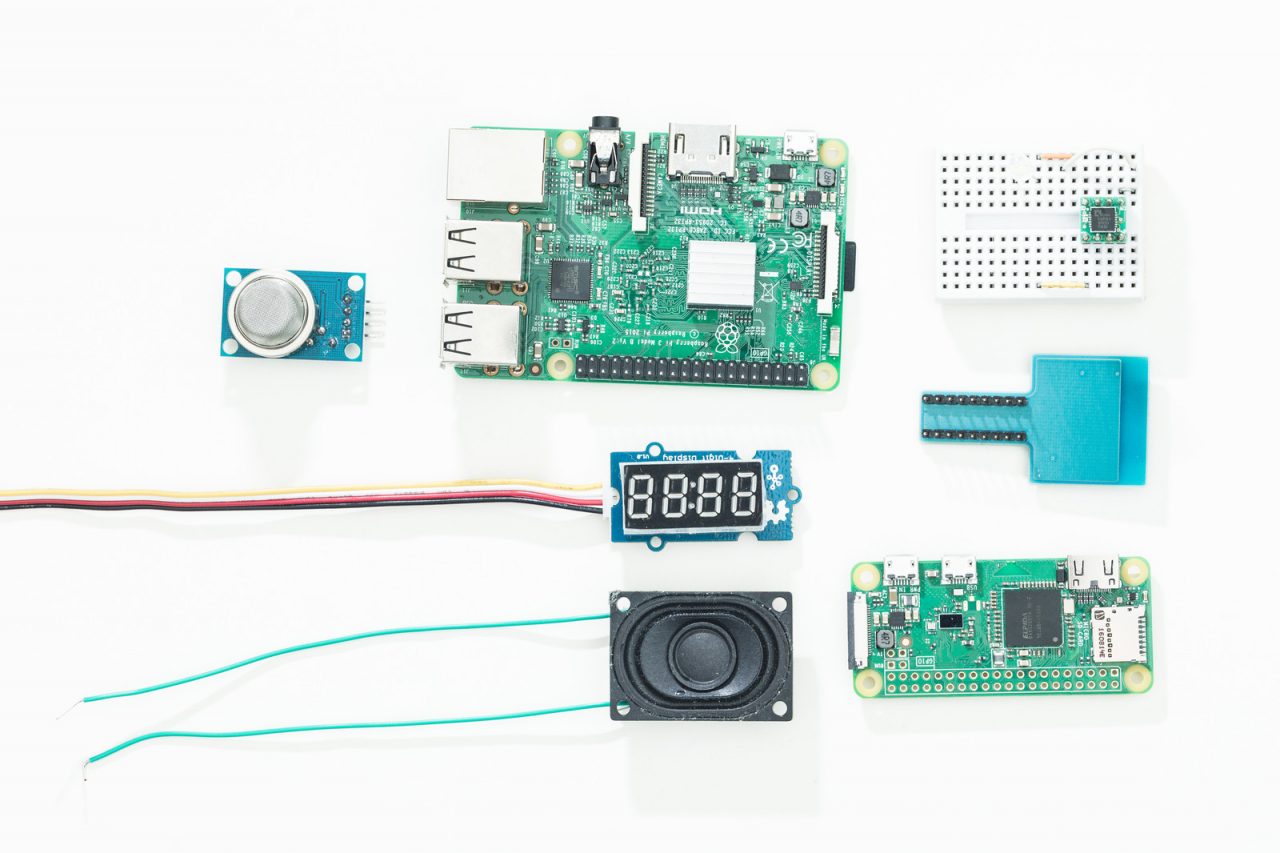
(2) メイン基板を固定してセンサーを各種取り替えながら開発する可能性を考えると、基板同士を繋ぐ規格は欲しいが、センサーには設置条件とか取り付け方法があるのでセンサー基板をメイン基板に直に固定する構造を取れるかどうかを予め決められない。例えばイメージセンサーはケースに固定したいし、温度センサーはケーブルで引き出したい、等が考えられる。と言うわけで、メイン基板に載せるコネクタ(メス)だけ決めることにする。そのコネクタ以降センサーまで、電線が繋がればどんな規格でもいいことになります。
(3) コネクタを決める際に考慮すべきなのは、(a)信号の種類(数)、(b)寸法・形状、であるが、今までの経験から次のようにする。
・I2Cのみの対応で大抵のことは実現できる。従って信号はVDD, GND, SCL, SDAの4本にする。
・VDDの電圧は決めない。5V対応のコネクタには5V対応のセンサーを刺せば良いだけだからだ。ここではコネクタ内のピン位置だけ決める。対応する電圧はコネクタ毎、基板にシルクで明示が必要だろう。
・試作では未だ主流の2.54mmピッチに合わせる。
※DFRobot社のGravity 4pin cableは2.0mmピッチのコネクタと2.54mmピッチのコネクタを両端に持っているようです <– ‘18.11.26追記
・実用化を視野に入れると、脱落しないようロック機構は欲しい。
※コネクタを各種見てきましたが、XHシリーズが一番当社の目的に適っていると思います。
これだけ決めておけばメイン基板の設計ができます。
ここまで